一、產品特點
?DC7-30V;
?繼電器輸出觸點隔離,觸點容量最大250VAC 30A/30VDC 30A;
?通訊接口支持無線WIFI+RJ45以太網口;
?WIFI支持2.4Ghz頻段網絡;
?以太網默認為10M接口;
?通信波特率:1200,2400,4800,9600,19200,38400,57600,115200;
?通信協議:支持標準modbus RTU/TCP協議;
?支持用戶二次開發。
二、產品功能
?十六路繼電器控制;
?可實現遠距離操控;
?支持局域網和外網控制使用;
?支持UDP/TCP工作模式;
?支持Client 、Server模式;
?支持透傳、力控、組態王、Modbus tcp連接;
?具有閃開、閃斷【點動】功能,可以自定義設置點動時間。
?支持本機非鎖聯動模式;
?支持本機自鎖聯動模式。
三、產品選型
型號 | modbus | RS232 | RS485 | 網口 | WiFi | 繼電器 |
DAM1600F-WIFI網口 | ● |
|
| ● | ● | 16 |
四、主要參數
參數 | 說明 |
觸點容量 | 10A/30VDC 10A/250VAC |
耐久性 | 10萬次 |
通訊接口 | WIFI+RJ45以太網口 |
網口參數 | 默認10M |
默認IP:192.168.1.232 |
默認端口號:10000 |
默認工作模式:TCP Server |
復位操作:長按復位按鍵12s |
WIFI參數 | 默認AP名稱:JY_**(**代表隨機數字字母組合) |
AP默認IP:192.168.10.1 |
默認端口:10000 |
默認工作模式:TCP Server |
復位操作:長按復位按鍵6s |
額定電壓 | DC 7-40V |
電源指示 | 1路紅色LED指示(不通信時常亮,通信時閃爍) |
輸出指示 | 16路紅色LED指示 |
溫度范圍 | 工業級,-40℃~85℃ |
尺寸 | 300*110*60mm |
重量 | 330g |
默認通訊格式 | 9600,n,8,1 |
波特率 | 1200,2400,4800,9600,19200,38400,57600,115200 |
軟件支持 | 配套配置軟件、app控制軟件,平臺軟件;
支持各家組態軟件;
支持Labviewd等 |
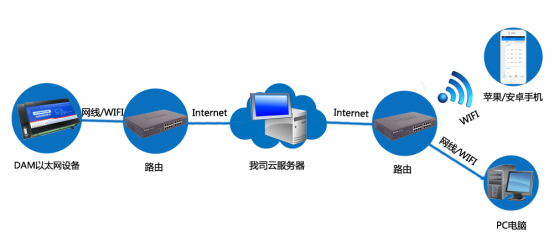
五、通訊架構說明
設備使用基于Internet廣域網進行遠程通訊,通過配置參數面向我司云服務器ems.jydtu.com,端口號60001進行通訊。
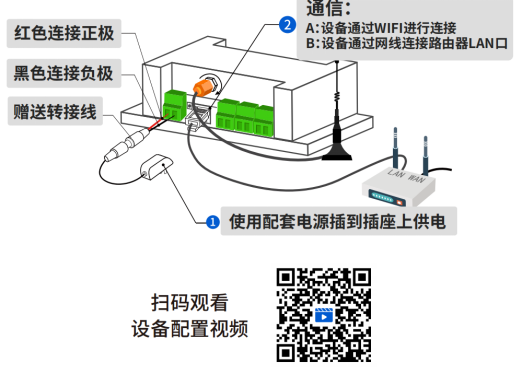
六、快速使用說明
1、掃碼下載安裝軟件,注冊賬號,掃碼添加設備。

2、選擇WIFI或網口通訊方式
3、WIFI網口配置手冊
下載地址:http://www.gzycns.com/download/JYCloud_NET-WIFI.pdf
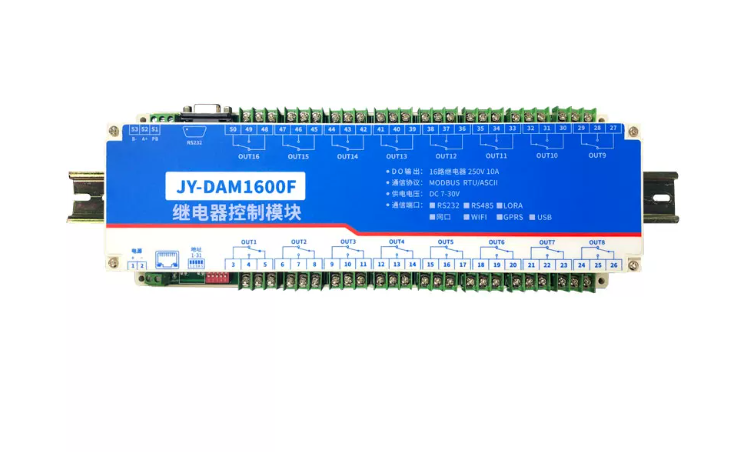
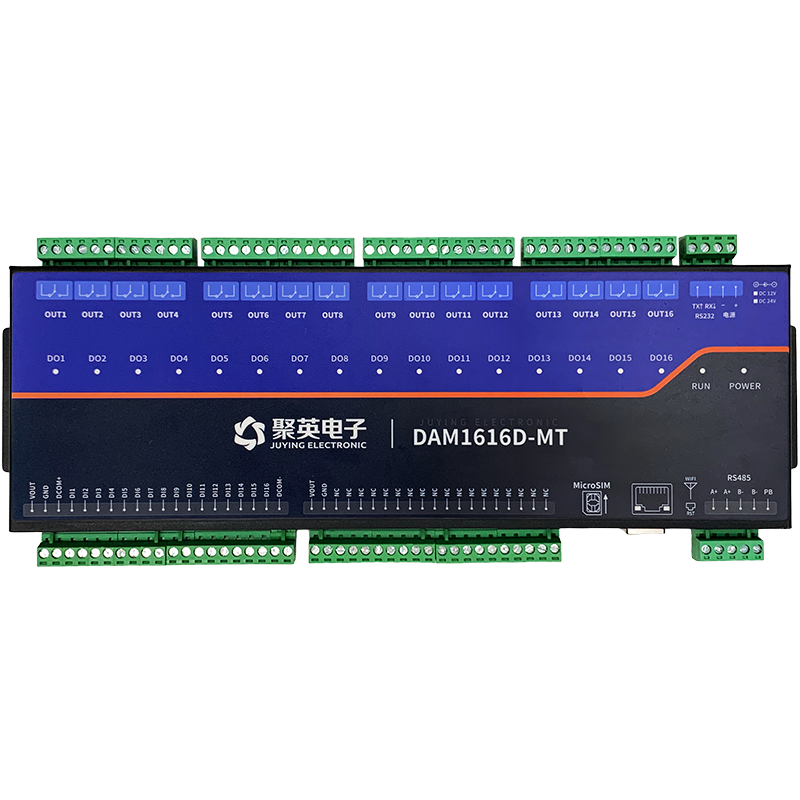
七、接口說明
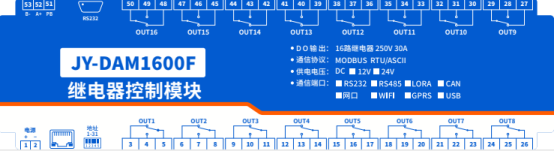
八、輸出接線
1、繼電器接線說明

九、平臺軟件說明
聚英云平臺為我公司開發的一款物聯網云平臺,平臺包含手機APP軟件和WEB版平臺,其中手機APP軟件包含Android、IOS兩大類,平臺以我公司的DAM系列網絡版設備和GPRS版設備為應用對象,旨在為用戶提供遠程控制輸出(繼電器、開關量)、模擬量(4-20mA、0-10V、0-5V)采集、開關量采集等服務,極大方便了用戶的需求。

電腦端WEB平臺地址:https://www.juyingiot.com/web/std/manager/#/
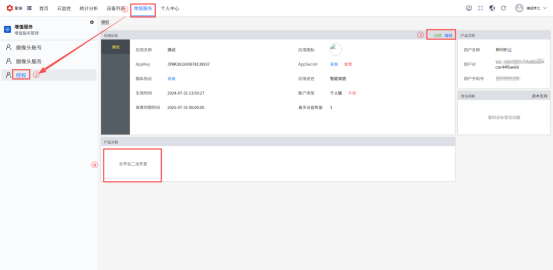
十、開發說明
云系列設備支持二次開發,有兩種方式:
一:是設備直接面向用戶自己得的服務器地址或第三方服務器,提供設備的通訊協議和指令,服務器端通訊流程說明。用戶需要獨立開發服務器端軟件,app小程序等前端平臺軟件;
二:調用我司云平臺API接口,用戶只需要開發前端軟件例如小程序,app,WEB平臺,PC端軟件等,可以減少80%的工作量和難度。
?調用API接口開發需要通過WEB平臺后臺進行自主授權申請。
十一、開發資料說明
1、工作模式
1.1工作模式說明
1.1.1、本機非鎖聯動模式
本身帶有光耦輸入和繼電器輸出的板卡模塊,在該模式下,輸入光耦與繼電器為直接聯動。即:光耦輸入信號生效—>對應繼電器吸合,光耦輸入信號取消—>對應繼電器斷開。
該模式下因為機械及程序的延遲,光耦輸入信號到繼電器動作會有一定的延遲,但最大不會超過0.05秒。
由于該模式下所有繼電器直接受光耦聯動,所以會出現串口無法操作繼電器的現象,這并不是異常現象,而是串口操作繼電器后,在繼電器還為動作之前就被光耦的狀態聯動了。
1.1.2、本機自鎖聯動模式
模塊本身帶有光耦輸入和繼電器輸出的板卡模塊,在該模式下,光耦每輸入一次信號,對應的繼電器翻轉一次。即:
光耦輸入信號生效—>繼電器翻轉(吸合變斷開、斷開變吸合);
光耦輸入信號取消—>繼電器不動作;
該模式同樣存在非鎖模式的延遲問題,但是延遲時間同樣不會大于0.05秒。
該模式主要可以用于外部信號觸發來控制設備啟停的場合,例如光耦外接一個按鈕,對應的繼電器外接用電設備,則每按一次按鈕,設備就會切換一次啟停狀態。
1.1.3、互鎖模式
模塊本身帶有光耦輸入和繼電器輸出的板卡模塊,在該模式下,光耦每輸入一次信號,對應的繼電器會吸合,其他未輸入信號光耦對應繼電器會斷開。即:
光耦輸入信號生效—>對應繼電器吸合其它繼電器斷開;
光耦輸入信號取消—>繼電器不動作;
該模式同樣存在非鎖模式的延遲問題,但是延遲時間同樣不會大于0.05秒。
該模式主要可以用于外部信號觸發來控制不同設備啟停的場合,例如多路光耦沒路外接一個按鈕,對應的繼電器外接用電設備,則按一路按鈕,對應設備就會切換到啟動狀態,其它設備就會停止運行。
1.1.4、雙機非鎖聯動模式
該模式需要兩個地址相同、模式相同的設備完成,兩個設備通過直連485或者交叉232連接起來之后,模塊1的光耦狀態會直接控制模塊2的對應繼電器的狀態,即:
模塊1的1號光耦輸入信號生效—>模塊2的1號繼電器吸合
模塊1的1號光耦輸入信號消失—>模塊2的1號繼電器斷開
該模式下的繼電器相應延遲時間較前幾種的模式要長,但不會大于0.1秒(9600波特率)
該模式下如果使用485總線的話可以并聯多個設備,其中設備兩兩地址匹配,這樣可以做到遠程的開關量傳輸。例如:現場有多個低速的開關量需要傳輸到500米外的控制機房去控制告警燈或者電鈴,則只需在廠房布置幾個模塊通過兩根雙絞屏蔽線連接到機房的對應模塊,就可以完成該任務。同理也可以把機房操作的按鈕信號信號直接傳送到位于機房模塊的繼電器上。
1.1.5、雙機自鎖聯動模式
該模式需要兩個地址相同、模式相同的設備完成,兩個設備通過直連485或者交叉232連接起來之后,模塊1的光耦狀態生效會翻轉控制模塊2的對應繼電器的狀態,即:
模塊1的1號光耦輸入信號生效—>模塊2的1號繼電器翻轉
模塊1的1號光耦輸入信號消失—>模塊2的1號繼電器不動作
該模式的應用與“雙機非鎖聯動”模式類似,但更適合于遠程控制設備的啟停,只需在操作端安裝一個按鈕即可實現按一次啟動按一次停止的動作。
2.2、工作模式配置
設備正常通訊后,在軟件工作模式部分選擇相應工作模式設置即可,如下圖所示:
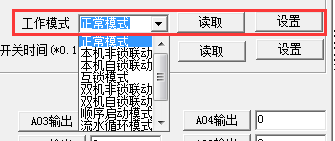
點擊設置后,軟件下方提示設置成功即可。
3、閃開閃斷功能及設置
3.1、閃開閃斷功能介紹
手動模式:對繼電器每操作一次,繼電器則翻轉一次(閉合時斷開,斷開時閉合);
閃開模式:對繼電器每操作一次,繼電器則閉合1秒(實際時間【單位秒】=設置數字*0.1)后自行斷開;
閃斷模式:對繼電器每操作一次,繼電器則斷開1.秒(時間可調)后自行閉合;
4、通訊協議說明
本產品支持標準modbus指令,有關詳細的指令生成與解析方式,可根據本文中的寄存器表結合參考《MODBUS協議中文版》 即可。
Modbus協議說明書下載鏈接地址:http://www.gzycns.com/download/Modbus_Protocol.zip
5、Modbus寄存器說明
本控制卡主要為線圈寄存器,主要支持以下指令碼:1、5、15
指令碼 | 含義 |
1 | 讀線圈寄存器 |
5 | 寫單個線圈 |
15 | 寫多個線圈寄存器 |
線圈寄存器地址表:
寄存器名稱 |
| 寄存器地址 | 說明 |
線圈控制 |
線圈1 | 寫線圈 1號指令碼 | 0x0001 | 第一路繼電器輸出 |
線圈2 | 0x0002 | 第二路繼電器輸出 |
線圈3 | 0x0003 | 第三路繼電器輸出 |
線圈4 | 0x0004 | 第四路繼電器輸出 |
線圈5 | 0x0005 | 第五路繼電器輸出 |
線圈6 | 0x0006 | 第六路繼電器輸出 |
線圈7 | 0x0007 | 第七路繼電器輸出 |
線圈8 | 0x0008 | 第八路繼電器輸出 |
線圈9 | 0x0009 | 第九路繼電器輸出 |
線圈10 | 0x0010 | 第十路繼電器輸出 |
線圈11 | 0x0011 | 第十一路繼電器輸出 |
線圈12 | 0x0012 | 第十二路繼電器輸出 |
線圈13 | 0x0013 | 第十三路繼電器輸出 |
線圈14 | 0x0014 | 第十四路繼電器輸出 |
線圈15 | 0x0014 | 第十五路繼電器輸出 |
線圈16 | 0x0015 | 第十六路繼電器輸出 |
備注:
①:Modbus設備指令支持下列Modbus地址:
00001至09999是離散輸出(線圈)
10001至19999是離散輸入(觸點)
30001至39999是輸入寄存器(通常是模擬量輸入)
40001至49999是保持寄存器(通常存儲設備配置信息)
采用5位碼格式,第一個字符決定寄存器類型,其余4個字符代表地址。地址1從0開始,如00001對應0000。
②:波特率數值對應表
數值 | 波特率 |
0 | 9600 |
1 | 2400 |
2 | 4800 |
3 | 9600 |
4 | 19200 |
5 | 38400 |
③:繼電器狀態,通過30002地址可以查詢,也可以通過00001---00002地址來查詢,但控制只能使用00001---00002地址。
30002地址數據長度為16bit。最多可表示16個繼電器。
對應結果如下:
Bit | 15 | 14 | 13 | 12 | 11 | 10 | 9 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 0 |
繼電器位置 | 8 | 7 | 6 | 5 | 4 | 3 | 2 | 1 | 16 | 15 | 14 | 13 | 12 | 11 | 10 | 9 |
即 寄存器30009數據 的bit8 與寄存器00001的數據一樣。
同理:光耦輸入也是如此。寄存器30003的bit8、bit9 與寄存器10001、10002都對應到指定的硬件上。
模式測試說明:
模式為0的時候,可以通過通用繼電器測試軟件和自定義協議測試軟件進行控制
模式為1的時候,輸入光耦可以觸發對應繼電器的狀態翻轉
模式為2的時候,輸入光耦狀態直接決定繼電器的狀態
模式為3的時候,功能同等于模式2
模式為4的時候,兩個DAM1616通過485總線連接,A+接A+,B-接B-.都配置為4,然后觸發1號板卡的光耦可以翻轉2號板卡的繼電器
模式為5的時候,按照模式4接線,觸發1號板卡的光耦,則2號板的對應繼電器會跟隨1號板卡的光耦狀態
寄存器地址按照PLC命名規則,真實地址為去掉最高位,然后減一。
參考資料:http://hi.baidu.com/anyili001/item/573454e6539f60afc10d75c9
3、指令生成說明
應用舉例及其說明:本機地址除了偏移地址地址之外,還有默認的254為廣播地址。當總線上只有一個設備時,無需關心撥碼開關地址,直接使用254地址即可,當總線上有多個設備時通過撥碼開關選擇為不同地址,發送控制指令時通過地址區別。
注意:RS232總線為1對1總線,即總線上只能有兩個設備,例如電腦與繼電器板卡,只有485總線才可以掛載多個設備。
指令可通過“聚英翱翔DAM調試軟件”,的調試信息來獲取。

指令生成說明:對于下表中沒有的指令,用戶可以自己根據modbus協議生成,對于繼電器線圈的讀寫,實際就是對modbus寄存器中的線圈寄存器的讀寫,上文中已經說明了繼電器寄存器的地址,用戶只需生成對寄存器操作的讀寫指令即可。例如讀或者寫繼電器1的狀態,實際上是對繼電器1對應的線圈寄存器00001的讀寫操作。
4、指令列表
情景 | RTU格式(16進制發送) |
查詢十六路狀態 | FE 01 00 00 00 10 29 C9 |
查詢指令返回信息 | FE 01 01 00 61 9C |
控制第一路開 | FE 05 00 00 FF 00 98 35 |
控制返回信息 | FE 05 00 00 FF 00 98 35 |
控制第一路關 | FE 05 00 00 00 00 D9 C5 |
控制返回信息 | FE 05 00 00 00 00 D9 C5 |
控制第二路開 | FE 05 00 01 FF 00 C9 F5 |
控制第二路關 | FE 05 00 01 00 00 88 05 |
控制第三路開 | FE 05 00 02 FF 00 39 F5 |
控制第三路關 | FE 05 00 02 00 00 78 05 |
控制第四路開 | FE 05 00 03 FF 00 68 35 |
控制第四路關 | FE 05 00 03 00 00 29 C5 |
控制第五路開 | FE 05 00 04 FF 00 D9 F4 |
控制第五路關 | FE 05 00 04 00 00 98 04 |
控制第六路開 | FE 05 00 05 FF 00 88 34 |
控制第六路關 | FE 05 00 05 00 00 C9 C4 |
控制第七路開 | FE 05 00 06 FF 00 78 34 |
控制第七路關 | FE 05 00 06 00 00 39 C4 |
控制第八路開 | FE 05 00 07 FF 00 29 F4 |
控制第八路關 | FE 05 00 07 00 00 68 04 |
控制第九路開 | FE 05 00 08 FF 00 19 F7 |
控制第九路關 | FE 05 00 08 00 00 58 07 |
控制第十路開 | FE 05 00 09 FF 00 48 37 |
控制第十路關 | FE 05 00 09 00 00 09 C7 |
控制第十一路開 | FE 05 00 0A FF 00 B8 37 |
控制第十一路關 | FE 05 00 0A 00 00 F9 C7 |
控制第十二路開 | FE 05 00 0B FF 00 E9 F7 |
控制第十二路關 | FE 05 00 0B 00 00 A8 07 |
控制第十三路開 | FE 05 00 0C FF 00 58 36 |
控制第十三路關 | FE 05 00 0C 00 00 19 C6 |
控制第十四路開 | FE 05 00 0D FF 00 09 F6 |
控制第十四路關 | FE 05 00 0D 00 00 48 06 |
控制第十五路開 | FE 05 00 0E FF 00 F9 F6 |
控制第十五路關 | FE 05 00 0E 00 00 B8 06 |
控制第十六路開 | FE 05 00 0F FF 00 A8 36 |
控制第十六路關 | FE 05 00 0F 00 00 E9 C6 |
5、指令詳解
5.1、繼電器輸出
控制1路繼電器(以第一路開為例,其他通道參照本例)
發送碼:FE 05 00 00 FF 00 98 35
字段 | 含義 | 備注 |
FE | 設備地址 | 這里為廣播地址 |
05 | 05指令 | 單個控制指令 |
00 00 | 地址 | 要控制繼電器寄存器地址 |
FF 00 | 指令 | 繼電器開的動作 |
98 35 | CRC16 | 前6字節數據的CRC16校驗和 |
繼電器卡返回信息:
返回碼:FE 05 00 00 FF 00 98 35
字段 | 含義 | 備注 |
FE | 設備地址 | 這里為廣播地址 |
05 | 05指令 | 單個控制指令 |
00 00 | 地址 | 要控制繼電器寄存器地址 |
FF 00 | 指令 | 繼電器開的動作 |
98 35 | CRC16 | 前6字節數據的CRC16校驗和 |
5.2、繼電器狀態
繼電器查詢
查詢16路繼電器
FE 01 00 00 00 10 29 C9
字段 | 含義 | 備注 |
FE | 設備地址 | 這里為廣播地址 |
01 | 01指令 | 查詢繼電器狀態指令 |
00 00 | 起始地址 | 要查詢的第一個繼電器寄存器地址 |
00 10 | 查詢數量 | 要查詢的繼電器數量 |
29 C9 | CRC16 | 前6字節數據的CRC16校驗和 |
繼電器卡返回信息:
FE 01 01 00 61 9C
字段 | 含義 | 備注 |
FE | 設備地址 |
|
01 | 01指令 | 返回指令:如果查詢錯誤,返回0x81 |
01 | 字節數 | 返回狀態信息的所有字節數。1+(n-1)/8 |
00 | 查詢的狀態 | 返回的繼電器狀態。 Bit0:第一個繼電器狀態 Bit1:第二個繼電器狀態 。。。。。。。 Bit7:第八個繼電器狀態 |
61 9C | CRC16 | 前6字節數據的CRC16校驗和 |
5.3、閃開閃閉指令
閃開閃閉指令解析
閃開發送碼:FE 10 00 03 00 02 04 00 04 00 0A 00 D8
閃斷發送碼:FE 10 00 03 00 02 04 00 02 00 14 21 62
字段 | 含義 | 備注 |
FE | 設備地址 |
|
10 | 10指令 | 查詢輸入寄存器指令 |
00 03 | 繼電器地址 | 要控制的器地址 |
00 02 | 控制命令數量 | 要對繼電的命令個數 |
04 | 字節數 | 控制信息命令的的所有字節數。1+(n-1)/8 |
00 04或00 02 | 指令 | 00 04為閃開指令 00 02為閃閉命令 |
00 0A | 間斷時間 | 00 0A為十六進制換為十進制則為10間隔時間為(0.1秒*10) |
00 D8 | CRC16 | 校驗方式 |
返回碼:FE 10 00 03 00 02 A5 C7
字段 | 含義 | 備注 |
FE | 設備地址 |
|
10 | 10指令 | 返回指令:如果查詢錯誤,返回0x82 |
00 03 | 設備地址 | 查詢設備的地址 |
00 02 | 接收命令數 | 設備接受的命令個數 |
A5 C7 | CRC16 | 校驗位 |
5.4、全開全關指令
全開全關指令解析
全開發送碼:FE 0F 00 00 00 10 02 FF FF A6 64
全斷發送碼:FE 0F 00 00 00 10 02 00 00 A7 D4
其中FF FF 為全開全關指令,為二進制轉換為16進制,2進制中1代表吸合,0代表斷開,11111111 11111111為全開,00000000
00000000為全斷,每8路為一個字節,起始為右側開始,如1、5、8、10、12、16通道打開,其他關閉,則1.5.8為10010001,16進制為91
,10,12,16為10001010,16進制為8A,全部開關指令為91 8A。
字段 | 含義 | 備注 |
FE | 設備地址 |
|
0F | 0F指令 | 返回指令:如果查詢錯誤,返回0x82 |
00 00 | 起始地址 |
|
00 10 | 控制數量 | 控制的繼電器數量 |
02 | 字節數 | 發送命令字節數 |
FF FF (或00 00) | 全開全關命令 | FF FF全開命令 00 00全關命令 |
A1 7C (或A0 CC) | CRC16 | 校驗位 |
全斷全開返回碼:FE 0F 00 00 00 10 40 08
字段 | 含義 | 備注 |
FE | 設備地址 |
|
0F | 0F指令 | 返回指令:如果查詢錯誤,返回0x82 |
00 00 | 起始地址 |
|
00 10 | 數量 | 返回信息的繼電器數量 |
C1 C3 | CRC16 | 校驗位 |








 官方微信
官方微信
 天貓店鋪
天貓店鋪
 京東店鋪
京東店鋪
 銷售王經理
銷售王經理
 微信公眾號
微信公眾號